在工业机器人控制系统中,PCBA作为核心硬件载体,其性能直接决定了机器人运动控制的精度与稳定性。高精度ADC(模拟数字转换器)电路负责将传感器采集的模拟信号转换为数字信号,是控制算法的关键输入环节。然而,电机驱动模块产生的高频噪声(如PWM开关噪声、电磁辐射等)极易对ADC电路造成干扰,导致信号失真、转换精度下降,甚至引发控制逻辑误判。深圳PCBA加工厂-1943科技结合PCBA加工工艺与SMT贴片技术,探讨从电路设计、布局布线到工艺实现的全流程噪声抑制策略。
一、电机驱动噪声对ADC电路的干扰机理分析
工业机器人电机驱动模块通常采用大功率IGBT或MOSFET器件,通过高频PWM(10-50kHz)信号控制电机转速与扭矩,其产生的噪声主要通过以下路径影响ADC电路:
1.传导噪声干扰
驱动电路的电源波动、地平面噪声通过电源线、地线传导至ADC供电端及参考电压端;PWM电流回路的di/dt变化在PCB寄生电感中产生耦合噪声,经公共地阻抗耦合到模拟信号链。
2.辐射噪声干扰
功率器件开关时产生的高频谐波(可达数百MHz)通过空间电磁辐射,直接耦合到ADC输入引脚或敏感模拟走线,尤其是长距离传感器信号线易成为辐射接收天线。
3.地环路干扰
驱动电路大电流回流与ADC模拟地之间若存在地电位差,会形成地环路噪声,导致ADC参考地波动,直接影响转换精度(如12位ADC的1LSB对应参考电压的1/4096,地噪声超过此值即产生量化误差)。
二、基于PCBA设计的噪声抑制核心策略
1.电源与地平面的分层隔离设计
(1)电源路径优化
- 独立电源分区:在PCBA设计阶段,采用多层板结构(建议≥4层),将驱动电源(高压大电流)与ADC电源(低压高精度)通过独立电源层隔离,中间以接地层作为屏蔽。例如,使用LDO稳压器为ADC供电,搭配10μF钽电容(SMT贴片时需注意极性)和0.1μF陶瓷电容进行高频滤波,电容应尽量靠近ADC电源引脚,缩短走线电感。
- 电源滤波网络:在驱动电源输入端并联100μF电解电容(抑制低频纹波)与10nF瓷片电容(抑制高频噪声),SMT贴片时确保电容焊盘与PCB铜箔良好焊接,避免虚焊导致的滤波失效。
(2)接地系统设计
- 模拟地与数字地分离:ADC电路采用独立模拟地(AGND),驱动电路采用数字地(DGND),两者仅在PCB单点星形接地(如电源模块处连接),避免地电流混叠。PCBA加工时,需确保接地铜箔厚度≥35μm,提高地平面导电能力。
- 接地过孔与焊盘设计:在ADC芯片下方设置密集接地过孔(直径0.3-0.5mm,间距1-2mm),通过SMT贴片将芯片接地焊盘与内层接地层直接导通,降低接地阻抗。对于QFP封装芯片,可在底部增加裸露焊盘(ThermalPad)并连接至模拟地,增强散热与接地效果。
2.信号链的噪声隔离与滤波
(1)差分输入与屏蔽设计
- 传感器信号差分传输:对于编码器、力传感器等模拟信号,采用差分放大器(如INA128)进行前端放大,抑制共模噪声(驱动电路噪声多以共模形式存在)。PCB布线时,差分信号线需等长、平行走线(间距≤3倍线宽),并在两侧铺设接地保护线,SMT贴片时确保电阻电容对称布局,避免差分对失衡。
- 隔离器件应用:在驱动电路与ADC之间插入数字隔离器(如ADuM5401)或模拟隔离器(如ISO124),切断噪声传导路径。隔离器件的布局需注意输入输出端的物理隔离,SMT贴片时避免焊锡桥接导致隔离失效。
(2)多级滤波电路设计
- RC/LC低通滤波器:在ADC输入前端设计2阶RC滤波器(如R=100Ω,C=10nF),截止频率设定为信号带宽的2-3倍,滤除驱动电路产生的高频噪声。电容选择低ESR的NP0陶瓷电容,电阻选用金属膜电阻(精度≤1%),SMT贴片时优先放置靠近ADC引脚的位置。
- 电磁兼容(EMC)器件:在PCB边缘的驱动电路区域增加TVS二极管(抑制浪涌)和磁珠(抑制高频噪声),磁珠需串联在驱动电源回路中,SMT贴片时注意磁珠的额定电流与阻抗匹配。
3.布局布线的抗干扰优化
(1)功能模块分区布局
- 噪声源与敏感元件隔离:将电机驱动模块(功率器件、电感、续流二极管)集中布局在PCB边缘,与ADC电路(含基准电压源、运放、传感器接口)保持至少10mm距离,中间以接地铜箔或金属屏蔽罩隔离。PCBA加工时,驱动模块的功率器件需加装散热片,散热片通过接地孔与PCB地平面连接,形成电磁屏蔽。
- 走线分层与方向控制:驱动电路的大电流走线(如PWM输出线)布设在PCB底层,ADC模拟信号线布设在顶层,两层之间以完整接地层隔离。避免模拟走线与功率走线平行交叉,必须交叉时采用垂直走线减少耦合。
(2)关键元件的SMT贴片工艺控制
- 焊盘与引脚共面性:ADC芯片多采用QFP或LQFP封装,SMT贴片时需控制焊盘共面度≤0.1mm,避免虚焊导致的信号接触不良。回流焊温度曲线需符合芯片规格书要求(如峰值温度245±5℃,保温时间60-90秒),防止高温损伤芯片内部电路。
- 被动元件的精度控制:基准电压源的外围电阻电容需选用高精度器件(电阻精度≤0.1%,电容精度≤1%),SMT贴片时通过视觉对位系统(AOI)确保元件值与位号一一对应,避免因元件错贴导致的基准电压漂移。
三、PCBA加工与测试验证流程
1.工艺实现要点
- 阻焊层设计:在ADC电路区域使用薄型阻焊剂(厚度≤25μm),减少介质损耗对高频信号的影响;驱动电路区域增加阻焊层厚度,防止焊锡飞溅导致短路。
- 表面处理工艺:对于敏感模拟电路,PCB表面处理优选沉金(ENIG)工艺(镀层厚度≥3μm),相比喷锡工艺具有更低的接触电阻和更好的抗氧化性,确保信号传输稳定性。
2.噪声抑制效果测试
- 频谱分析仪测试:在电机满负荷运行时,测试ADC输入引脚的噪声频谱,目标将20kHz以上的噪声幅值抑制在ADC最低有效位(LSB)电压的1/2以下(如16位ADC的LSB为Vref/65536)。
- 动态性能测试:输入标准正弦波信号,通过FFT分析ADC输出的信噪比(SNR),优化后SNR应提升5-10dB,无杂散动态范围(SFDR)≥75dB。
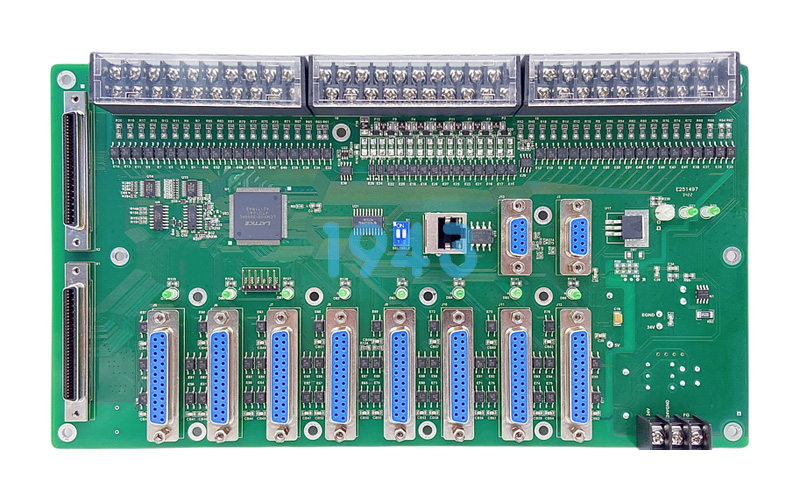
四、参考案例:某六轴机器人控制板优化参考
某工业机器人控制板初始设计中,ADC电路受电机驱动噪声影响,在高速运动时位置反馈信号出现±2LSB的波动,导致轨迹控制精度下降。通过以下优化措施解决问题:
- 接地优化:将ADC模拟地与驱动地由多点接地改为单点星形接地,增加4个直径0.4mm的接地过孔至底层接地层;
- 滤波增强:在传感器信号线入口处增加LC滤波电路(L=10μH,C=47nF),SMT贴片时采用0402封装的高频电感与NP0电容;
- 布局调整:将驱动模块的续流二极管由水平布局改为垂直于ADC走线方向,减少磁场耦合。优化后测试显示,ADC输入噪声从80μV降至15μV,位置反馈精度提升至±0.5LSB,满足机器人±0.1mm的定位精度要求。
五、结论
工业机器人控制板PCBA的高精度ADC电路抗干扰设计,需从电路原理、PCB布局、元件选型到SMT贴片工艺进行全流程控制。通过电源地平面隔离、信号链滤波、布局分区等设计策略,结合PCBA加工中接地过孔处理、元件焊接精度控制等工艺手段,可有效抑制电机驱动噪声干扰,确保ADC电路的高精度信号转换。在实际工程中,建议通过热仿真与EMC仿真工具进行前期验证,结合批量PCBA加工的首件测试(FAI)与可靠性试验,最终实现控制板的高稳定性与抗干扰能力。
因设备、物料、生产工艺等不同因素,内容仅供参考。了解更多smt贴片加工知识,欢迎访问深圳PCBA加工厂-1943科技。



 2024-04-26
2024-04-26