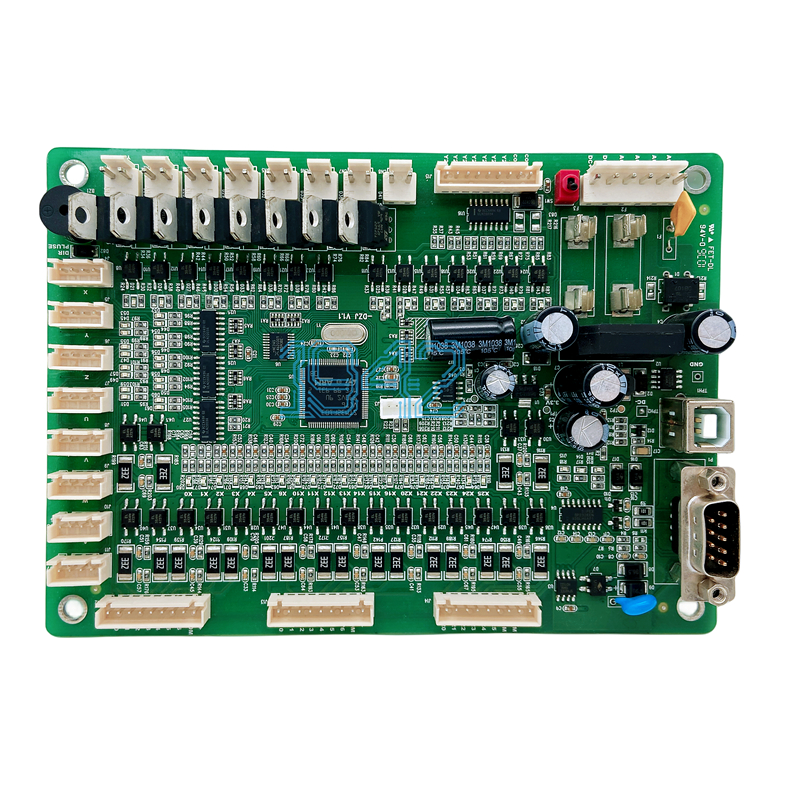
在工业机器人驱动器的PCBA加工中,SMT贴片加工是核心环节。由于厚膜电阻器在高温回流焊过程中易因热膨胀系数差异产生热应力裂纹,直接影响电路性能与长期可靠性。通过优化SMT回流焊工艺中预加热区的温度梯度控制,可有效缓解厚膜电阻与基板之间的热应力集中,降低裂纹发生率。以下是具体技术路径与实施要点。
1. 厚膜电阻热应力裂纹的成因分析
厚膜电阻器通常以氧化铝陶瓷为基底,其热膨胀系数(CTE)显著高于PCB基材(如FR-4)。在SMT贴片加工的回流焊过程中,预加热阶段若升温速率过快或温度梯度不合理,会导致厚膜电阻与PCB之间产生显著的热膨胀差异,从而引发界面应力集中。当应力超过材料强度极限时,便会在电阻本体或焊点处形成裂纹(如端子与电极结合处)。
此外,厚膜电阻的电极间距较大(尤其在大尺寸型号中),进一步加剧了热应力分布的不均匀性。此类裂纹可能引发电阻阻值漂移、开路失效,甚至在后续振动或温度循环中扩展为致命缺陷。
2. 预加热区温度梯度控制的关键作用
在SMT回流焊中,预加热区(升温区) 的温度曲线设计是减少热应力裂纹的核心环节。通过分段式温度梯度控制,可逐步平衡厚膜电阻与PCB的热膨胀差异,具体优化策略如下:
(1)分阶段升温速率控制
- 第一阶段(60-120℃,1-2℃/s):快速去除PCB表面水分与助焊剂挥发物,减少后续高温阶段的气相冲击。
- 第二阶段(120-180℃,0.5-1℃/s):缓慢升温以平衡厚膜电阻与PCB的热膨胀速率,降低界面应力峰值。
- 第三阶段(180-220℃,1-1.5℃/s):加速接近回流温度,确保焊膏活性充分释放。
(2)梯度温度区间设计
通过设置多段加热区域(如3-4段),使PCB板面温度分布均匀化,避免局部过热或冷区导致应力分布不均。例如:
- 前两段:采用低温宽幅加热(±10℃),确保整个PCB基板同步升温。
- 后段:局部强化加热高热容区域(如厚膜电阻密集区),补偿其热惯性差异。
(3)实时温度监测与反馈
在机器人PCBA加工中,需配置红外测温仪或热电偶阵列,实时采集PCB板面温度数据。通过闭环控制系统动态调整加热功率,确保实际温度曲线与目标曲线偏差控制在±3℃以内。
3. SMT贴片加工中的协同优化措施
预加热区温度梯度控制需与其他工艺环节协同配合,以最大化抗裂纹效果:
(1)焊膏印刷精度优化
- 控制焊膏厚度(推荐0.1-0.15mm)与印刷一致性,减少回流焊时焊料流动差异引发的应力扰动。
- 对厚膜电阻焊盘采用阶梯式焊膏设计(如中心区域略高),增强焊点机械锚定能力。
(2)回流焊氮气保护
引入氮气环境(O₂浓度<50ppm),减少氧化导致的焊点脆性相生成,同时抑制厚膜电阻端子表面氧化物的热膨胀失配。
(3)后处理应力释放
在回流焊后增加阶梯式冷却(如从240℃降至100℃耗时90秒,速率1-2℃/s),避免快速冷却加剧热应力累积。
4. 检测与验证方法
为确保工艺优化效果,需通过以下手段进行质量验证:
- AOI/X-ray检测:识别焊点空洞、裂纹等缺陷,要求厚膜电阻焊点空洞率<5%。
- 热循环测试:模拟工业机器人驱动器的工作环境(-40℃至125℃,500次循环),观察电阻阻值稳定性及裂纹扩展情况。
- 机械拉力测试:抽样测试厚膜电阻焊点的抗拉强度(推荐≥0.2N/mm²),验证其抗疲劳性能。
5. 工艺文件与标准化管理
在机器人PCBA加工中,需建立完整的工艺文件体系:
- 温度曲线模板:针对不同尺寸厚膜电阻设定专用升温/降温曲线,并记录每批次的实际执行参数。
- 设备校准记录:定期校验贴片机精度、回流焊炉温度均匀性及氮气纯度,确保工艺稳定性。
- 过程控制表:记录焊膏印刷厚度、贴片偏移量等关键参数,实现全流程可追溯性。
结语
在工业机器人驱动器的PCBA加工中,厚膜电阻的热应力裂纹问题可通过SMT贴片加工中预加热区的温度梯度控制有效缓解。通过分阶段升温设计、实时温度监测及工艺协同优化,可显著降低界面应力峰值,提升焊点可靠性。未来,随着AI驱动的智能温控系统与新型低应力材料的应用,机器人PCBA的抗疲劳性能将进一步增强,为高精度工业场景提供更稳定的解决方案。
因设备、物料、生产工艺等不同因素,内容仅供参考。了解更多smt贴片加工知识,欢迎访问深圳PCBA加工厂-1943科技。


 2024-04-26
2024-04-26